在CVPR 2026的“物理AI华山论剑”上,小鹏和特斯拉两位AI软件操盘手同台分享成果,一个刚量产就破行业纪录,一个手握百亿英里级数据,各自给出了不同的物理AI解题思路。
小鹏刘先明:VLA+世界模型双支柱,已拿量产数据说话
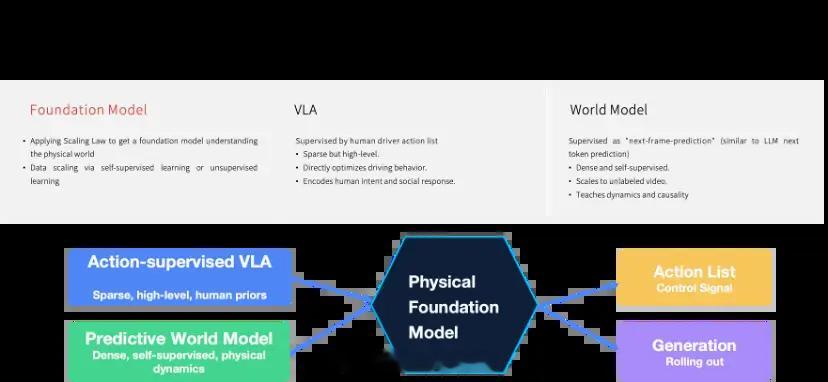
小鹏的思路并不是在VLA(视觉-语言-动作模型)和世界模型中二选一,而是将两者融合为物理世界基座模型的两大支柱。第二代VLA负责“向人类学习”——将视频流、指令与动作输出统一建模,掌握在复杂交通环境中的行动能力;世界模型则借鉴大语言模型“下一个Token预测”范式,通过逐帧密集预测来学习物理世界的动力学与因果结构,让模型理解“行动之后世界会如何变化”。
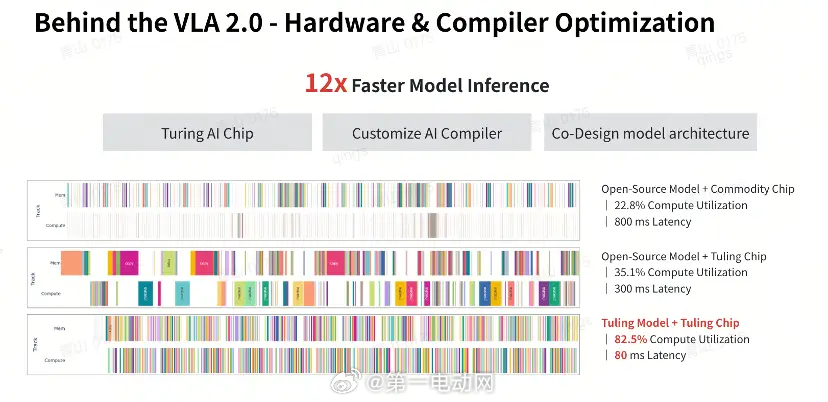
这套架构于今年3月量产推送,首月即交出硬核成绩单:辅助驾驶里程占比突破50%,行业首个达成这一里程碑的系统Ultra车型新车首周每日开启智驾比例达98.52%百公里接管次数环比减少25.9%,复杂小路接管次数下降36.28%50岁以上女性车主中95.3%体验过该系统,智驾覆盖从极客扩展至全年龄段第二代VLA已从汽车延伸至Robotaxi、人形机器人,物理AI基座模型正在兑现跨场景通用能力。
特斯拉Ashok Elluswamy:端到端纯视觉路线,数据与验证构筑护城河特斯拉坚持纯视觉、单一大模型的端到端路线,运行频率达36赫兹:FSD全球累计行驶里程突破100亿英里,重大碰撞事故率为每853万公里1起,低于美国人类驾驶员的每106万公里1起FSD V13城市复杂路况平均接管间隔降至每1000英里仅0.3次,安全性约为美国普通人类驾驶员的8倍最新版本V14.3.3刚刚完成横穿加拿大6051公里全程零干预挑战,覆盖城市道路、高速公路、施工区等复杂路况
如果说特斯拉的叙事主题是“通过海量数据与零干预验证,证明纯视觉泛化能力已逼近无人驾驶门槛”;小鹏则在CVPR上展现了“VLA+世界模型从理论到车端应用的完整工程落地,用首月50%智驾里程占比和高粘性用户数据,论证物理AI对C端有实际吸引力”——一个靠数据积累和极端场景验证看上限,一个凭快速量产落地和用户粘性拼渗透率,代表了物理AI走向商业化的两种务实路径
两个“学霸”的思路差异小鹏在探索如何让AI像人一样“学习+推演”,追求通用物理智能底座(“一个模型,两个支柱”)。而特斯拉在训练一个能直接“看+思考+行动”的终极司机。
两家并非完全对立,小鹏世界模型借鉴了LLM“预测下一个Token”的范式,这和特斯拉世界模拟器的底层逻辑异曲同工,都在通过密集预测物理世界的演变,来赋予AI因果推理能力。特斯拉FSD小鹏VLA2.0